Πριν ξεκινήσουμε τη διασύνδεση του ESP32 με τον αισθητήρα PIR, πρέπει να γνωρίζουμε πώς λειτουργούν οι διακοπές και πώς να τις διαβάζουμε και να τις χειριζόμαστε στο ESP32. Ας συζητήσουμε τη λειτουργία του PIR με το ESP32 λεπτομερώς.
Ακολουθεί το περιεχόμενο αυτού του άρθρου:
1.1: Πινέζες διακοπής στο ESP32
2: Κλήση διακοπής στο ESP32 – MicroPython
3: Διασύνδεση αισθητήρα PIR με ESP32 – MicroPython
3.1: Αισθητήρας κίνησης PIR (HC-SR501)
1: Τι είναι οι διακοπές
Τα περισσότερα από τα συμβάντα που συμβαίνουν στον προγραμματισμό ESP32 εκτελούνται διαδοχικά που σημαίνει εκτέλεση κώδικα γραμμή προς γραμμή. Για το χειρισμό και τον έλεγχο των συμβάντων που δεν χρειάζεται να εκτελούνται κατά τη διαδοχική εκτέλεση του κώδικα an Διακόπτει είναι μεταχειρισμένα.
Για παράδειγμα, εάν θέλουμε να εκτελέσουμε μια συγκεκριμένη εργασία όταν συμβαίνει κάποιο ειδικό συμβάν ή δίνεται ένα σήμα ενεργοποίησης σε ψηφιακές ακίδες του μικροελεγκτή χρησιμοποιούμε διακοπή.
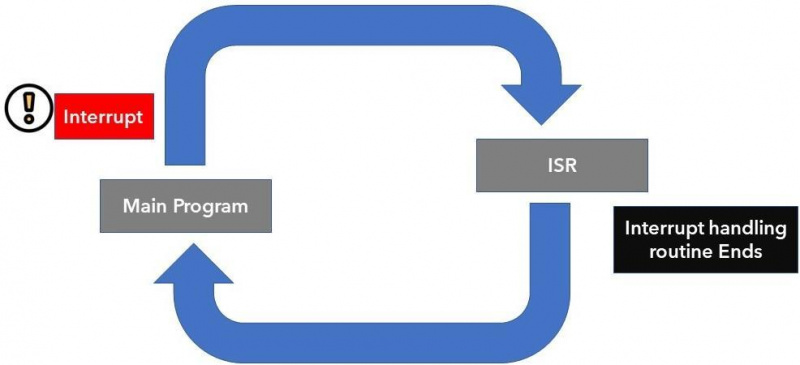
Με διακοπή δεν χρειάζεται να ελέγχουμε συνεχώς την ψηφιακή κατάσταση του ακροδέκτη εισόδου ESP32. Όταν συμβεί μια διακοπή, ο επεξεργαστής σταματά το κύριο πρόγραμμα και καλείται μια νέα συνάρτηση που είναι γνωστή ως ISR ( Διακοπή ρουτίνας σέρβις ). Αυτό ISR Η λειτουργία χειρίζεται τη διακοπή που προκαλείται μετά από αυτήν την επιστροφή στο κύριο πρόγραμμα και ξεκινά την εκτέλεσή του. Ένα από τα παραδείγματα ISR είναι ο αισθητήρας κίνησης PIR που δημιουργεί μια διακοπή μόλις ανιχνευτεί κίνηση.
1.1: Πινέζες διακοπής στο ESP32
Μια εξωτερική διακοπή ή διακοπή υλικού μπορεί να προκληθεί από οποιαδήποτε μονάδα υλικού, όπως αισθητήρα αφής ή κουμπί. Οι διακοπές αφής συμβαίνουν όταν ανιχνεύεται ένα άγγιγμα στις ακίδες ESP32 ή η διακοπή GPIO μπορεί επίσης να χρησιμοποιηθεί όταν πατηθεί ένα πλήκτρο ή ένα κουμπί.
Σε αυτό το άρθρο θα ενεργοποιήσουμε μια διακοπή όταν ανιχνευτεί η κίνηση χρησιμοποιώντας τον αισθητήρα PIR με ESP32.
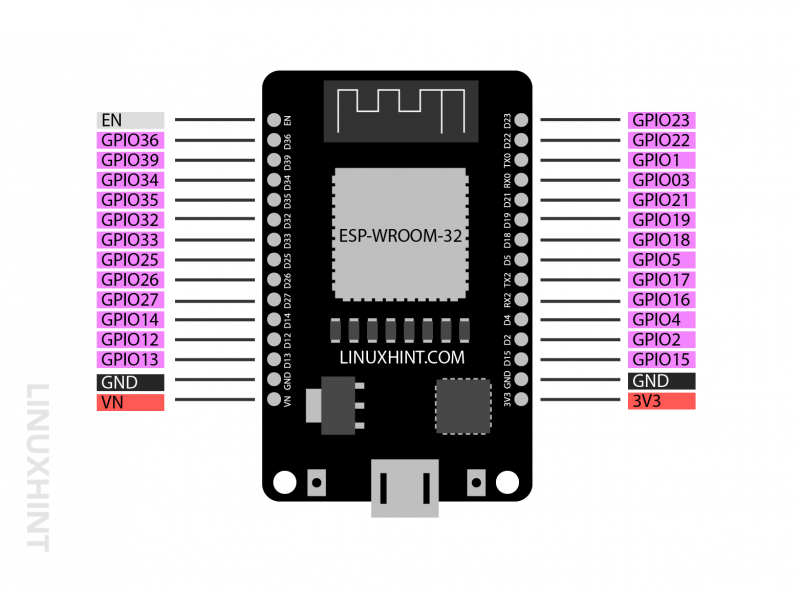
Σχεδόν όλες οι ακίδες GPIO εκτός από 6 ενσωματωμένες ακίδες SPI που συνήθως μπαίνουν στο 36 Η έκδοση pin της πλακέτας ESP32 δεν μπορεί να χρησιμοποιηθεί για σκοπούς διακοπής κλήσης. Έτσι, για να λάβετε την εξωτερική διακοπή ακολουθούν οι ακίδες που μπορεί κανείς να χρησιμοποιήσει στο ESP32:
2: Κλήση διακοπής στο ESP32 με χρήση MicroPython
Για να προγραμματίσετε μια πλακέτα ESP32 με αισθητήρα PIR χρησιμοποιώντας τον κώδικα MicroPython. Πρέπει να ορίσουμε μια συνάρτηση διακοπής. Ακολουθούν μερικά απλά βήματα που βοηθούν στον καθορισμό μιας διακοπής για την πλακέτα ESP32.
Βήμα 1: Εκκίνηση της λειτουργίας χειρισμού διακοπών: Η λειτουργία χειρισμού διακοπής πρέπει να ορίζεται με εύκολο τρόπο, ώστε να μπορεί να εκτελείται γρήγορα και να επιστρέψει στο κύριο πρόγραμμα όσο το δυνατόν γρηγορότερα. Αυτό μπορεί να γίνει ορίζοντας μια καθολική μεταβλητή, ώστε να μπορεί να προσπελαστεί οπουδήποτε μέσα στον κώδικα, εάν κληθεί.
Εδώ σε περίπτωση αισθητήρα PIR θα χρησιμοποιήσουμε τον ακροδέκτη GPIO ως α παγκόσμια μεταβλητός. Η συνάρτηση διακοπής θα λάβει μια ακίδα ως όρισμα και θα περιγράψει την ακίδα GPIO που προκαλεί την εμφάνιση της συνάρτησης διακοπής.
def handle_interrupt ( καρφίτσα ) :Βήμα 2: Ρυθμίστε την καρφίτσα GPIO για διακοπή: Για να λάβουμε την τιμή του GPIO pin πρέπει να δημιουργήσουμε ένα αντικείμενο που θα λαμβάνει δεδομένα από αυτό χρησιμοποιώντας το Pin.IN ως το δεύτερο όρισμα μέσα στην κλάση pin μας. Μπορούμε να το μετονομάσουμε με οποιοδήποτε άλλο.
καρφίτσα = Καρφίτσα ( 13 , Καρφίτσα. ΣΕ )Βήμα 3: Προσαρτήστε τη διακοπή στην ακίδα GPIO για αισθητήρα PIR χρησιμοποιώντας τη μέθοδο irq():
Χρησιμοποιώντας την παρακάτω εντολή, μπορούμε να ορίσουμε τη διακοπή σε μια καρφίτσα που ορίσαμε νωρίτερα.
η γέφυρα. irq ( δώσει το έναυσμα για = Καρφίτσα. IRQ_RISING , χειριστής = handle_interrupt )ο irq() μέθοδος χρησιμοποιείται για την προσάρτηση της διακοπής στον πείρο. irq() δέχεται δύο διαφορετικά επιχειρήματα:
- Δώσει το έναυσμα για
- Χειριστής
δώσει το έναυσμα για: Αυτό το επιχείρημα εξηγεί τον τρόπο ενεργοποίησης. Ακολουθούν τρεις τρόποι λειτουργίας:
- Pin.IRQ_FALLING: Όταν μια ακίδα μεταβαίνει από HIGH σε LOW, ξεκινά μια διακοπή.
- Pin.IRQ_RISING: Κατά τη μετάβαση της ακίδας από LOW σε HIGH, ξεκινά μια διακοπή.
- Pin.IRQ_FALLING|Pin.IRQ_RISING: Ενεργοποιήστε τη διακοπή κάθε φορά που μια ακίδα αλλάζει την κατάστασή της. Είτε η ακίδα πηγαίνει σε HIGH ή LOW.
χειριστής: Αυτή η συνάρτηση θα κληθεί μόλις ενεργοποιηθεί μια διακοπή.
3: Διασύνδεση αισθητήρα PIR με ESP32
Καθώς τώρα καλύψαμε τις έννοιες της διακοπής με το ESP32 χρησιμοποιώντας το MicroPython τώρα θα διασυνδέσουμε τον αισθητήρα PIR με το ESP32. Εδώ θα χρησιμοποιήσουμε Pin.IRQ_RISING λειτουργία στον κώδικα MicroPython για αισθητήρα PIR επειδή θέλουμε να ενεργοποιούμε ένα LED κάθε φορά που ο αισθητήρας PIR ανιχνεύει κάποια κίνηση. Αυτή η λυχνία LED θα παραμείνει αναμμένη για ορισμένο χρόνο και στη συνέχεια σβήνει.
Θα απαιτηθούν τα ακόλουθα εξαρτήματα:
- Πλακέτα ανάπτυξης ESP32
- Αισθητήρας κίνησης PIR (HC-SR501)
- Αντίσταση 220 Ohm
- Καλώδια βραχυκυκλωτήρα
- Breadboard
- LED
Σχηματικός για αισθητήρα PIR με ESP32:
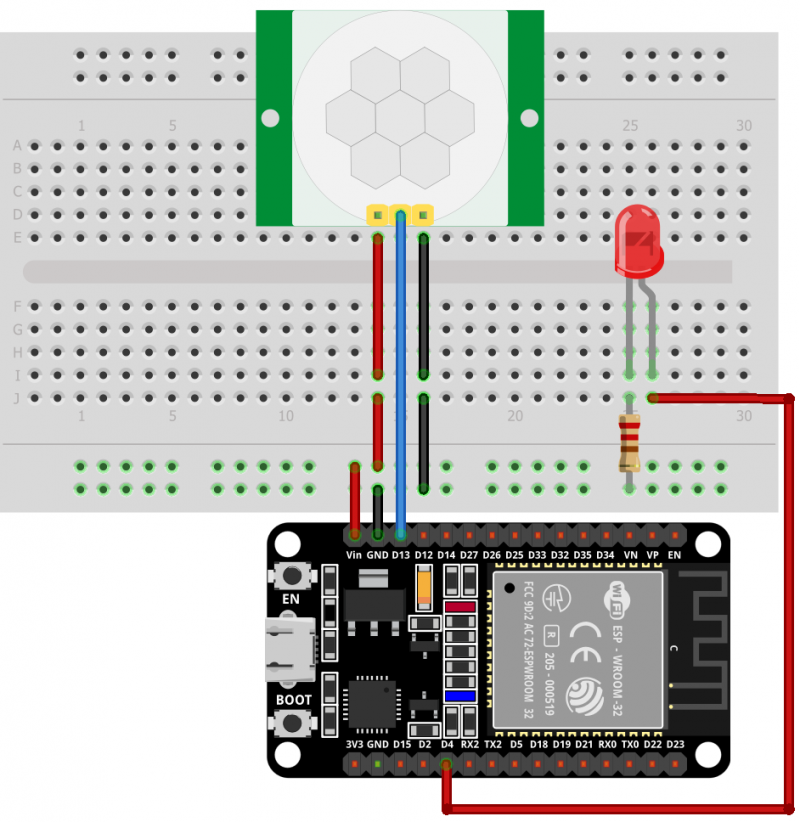
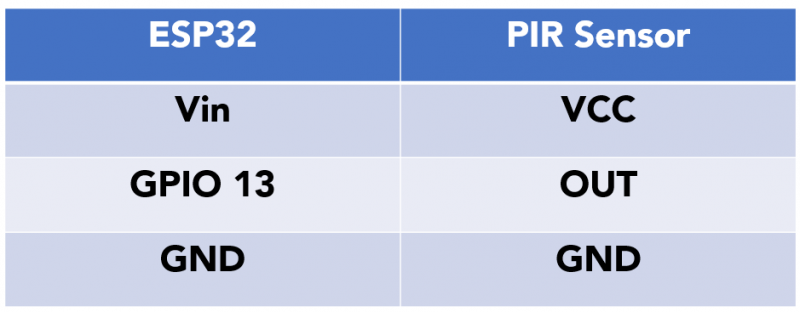
Η διαμόρφωση pin του ESP32 με αισθητήρα PIR είναι:
3.1: Αισθητήρας κίνησης PIR (HC-SR501)
Το PIR είναι ένα αρκτικόλεξο για Παθητικοί αισθητήρες υπερύθρων . Δύο πυροηλεκτρικοί αισθητήρες που χρησιμοποιούνται μαζί που θα ανιχνεύουν την ποσότητα θερμότητας γύρω από το περιβάλλον. Και οι δύο αυτοί πυροηλεκτρικοί αισθητήρες βρίσκονται ο ένας μετά τον άλλο και όταν ένα αντικείμενο μπαίνει μέσα στην εμβέλειά τους, μια αλλαγή στη θερμική ενέργεια ή η διαφορά σήματος μεταξύ αυτών των αισθητήρων κάνει την έξοδο του αισθητήρα PIR να είναι ΧΑΜΗΛΗ. Μόλις το PIR out PIR πέσει LOW, μπορούμε να ορίσουμε μια συγκεκριμένη εντολή για εκτέλεση (το LED αναβοσβήνει).
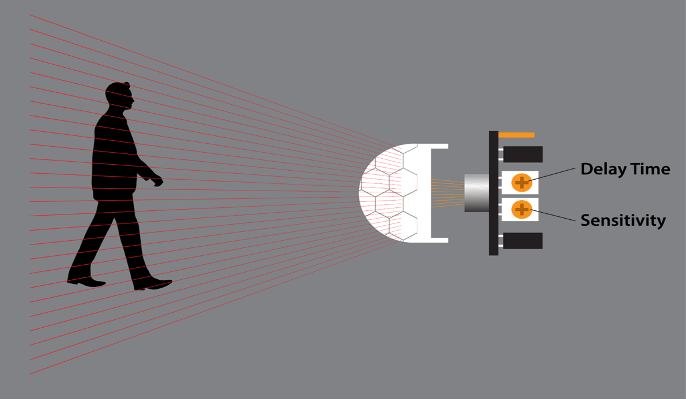
Ακολουθούν τα χαρακτηριστικά του αισθητήρα PIR:
- Η ευαισθησία μπορεί να ρυθμιστεί ανάλογα με τη θέση του έργου (όπως ανίχνευση κίνησης ποντικιού ή φύλλου)
- Ο αισθητήρας PIR μπορεί να ρυθμιστεί για πόσο χρόνο ανιχνεύει ένα αντικείμενο
- Χρησιμοποιείται ευρέως σε συναγερμούς οικιακής ασφάλειας και άλλες εφαρμογές ανίχνευσης κίνησης με βάση τη θερμότητα.
3.2: Pinout HC-SR501
Το PIR HC-SR501 συνοδεύεται από τρεις ακίδες. Δύο από αυτές είναι ακίδες ισχύος για Vcc και GND και μία είναι η ακίδα εξόδου για το σήμα σκανδάλης.
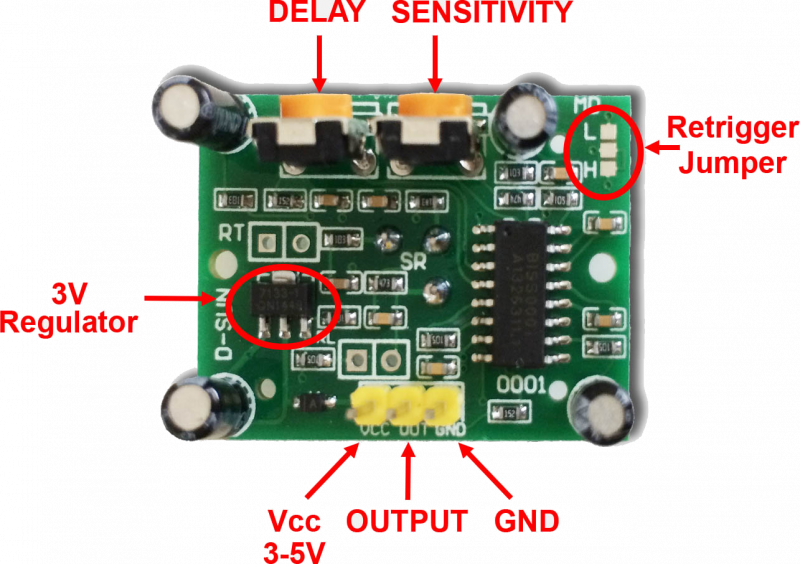
Ακολουθεί η περιγραφή των ακίδων αισθητήρα PIR:
| Καρφίτσα | Ονομα | Περιγραφή |
| 1 | Vcc | Πείρο εισόδου για αισθητήρα Συνδέστε στο ESP32 Vin Pin |
| δύο | ΕΞΩ | Έξοδος αισθητήρα |
| 3 | GND | Αισθητήρας GND |
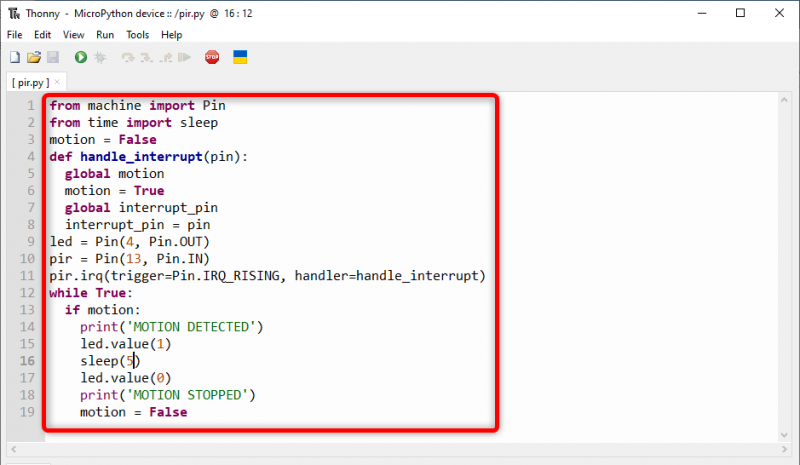
Τώρα για να προγραμματίσετε το ESP32, γράψτε τον κώδικα που δίνεται στον επεξεργαστή Thonny IDE ή σε οποιοδήποτε άλλο MicroPython IDE και ανεβάστε τον στο ESP32.
από την εισαγωγή μηχανήματος Pinαπό χρόνος εισαγωγή ύπνου
κίνηση = Ψευδής
def handle_interrupt ( καρφίτσα ) :
παγκόσμια κίνηση
κίνηση = Αληθής
καθολική καρφίτσα διακοπής
interrupt_pin = καρφίτσα
οδήγησε = Καρφίτσα ( 4 , Καρφίτσα. ΕΞΩ )
η γέφυρα = Καρφίτσα ( 13 , Καρφίτσα. ΣΕ )
η γέφυρα. irq ( δώσει το έναυσμα για = Καρφίτσα. IRQ_RISING , χειριστής = handle_interrupt )
ενώ Αληθής :
αν κίνηση :
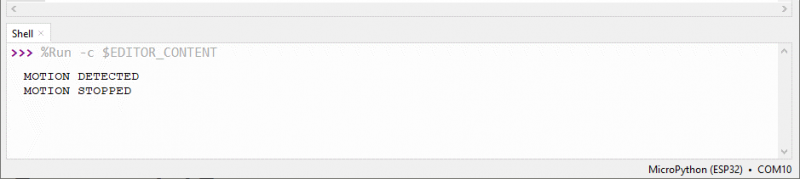
Τυπώνω ( 'ΑΝΙΧΝΕΥΘΗΚΕ ΚΙΝΗΣΗ' )
οδήγησε. αξία ( 1 )
ύπνος ( 5 )
οδήγησε. αξία ( 0 )
Τυπώνω ( 'Η ΚΙΝΗΣΗ ΣΤΑΜΑΤΗΣΕ' )
κίνηση = Ψευδής
Πρώτα, εισάγαμε το καρφίτσα τάξη από τη μονάδα μηχανής και ύπνος μέθοδος προσθήκης καθυστέρησης. Στη συνέχεια δημιουργείται μια μεταβλητή με όνομα κίνηση. Αυτή η μεταβλητή θα ανιχνεύσει εάν ανιχνεύεται μια κίνηση ή όχι.
Στη συνέχεια δημιουργήσαμε μια συνάρτηση handle_interrupt. Κάθε φορά που ο αισθητήρας PIR ανιχνεύει κίνηση, αυτή η λειτουργία θα ενεργοποιείται. Λαμβάνει μια ακίδα ως παράμετρο εισόδου και υποδεικνύει την ακίδα που προκαλεί τη διακοπή.
Με απλά λόγια κάθε φορά που το PIR ανιχνεύει κίνηση, handle_interrupt θα ορίσει τη μεταβλητή κίνησης σε true και θα αποθηκεύσει την ακίδα που προκαλεί τη διακοπή. Ένα πράγμα να θυμάστε δηλώνει πάντα το κίνηση μεταβλητή ως καθολική επειδή είναι απαραίτητη σε όλο τον κώδικα.
Προχωρώντας προς τα εμπρός, δημιουργήσαμε δύο αντικείμενα καρφίτσας, το ένα για την αποθήκευση των ακίδων LED και το δεύτερο θα λαμβάνει έξοδο αισθητήρα PIR στην ακίδα GPIO 13. Περαιτέρω δηλώσαμε την ακίδα ενεργοποίησης σε ΑΥΞΑΝΟΜΕΝΕΣ τρόπος.
Στο βρόχος μέρος του κώδικα, θα ελέγξει για την τιμή της μεταβλητής κίνησης μόλις γίνει αληθινή Η LED θα ανάψει συνδεδεμένη στην ακίδα 4 του ESP32. Εάν το LED σταμάτησε την κίνηση θα σβήσει μετά από 5 δευτερόλεπτα.
3.4: Έξοδος
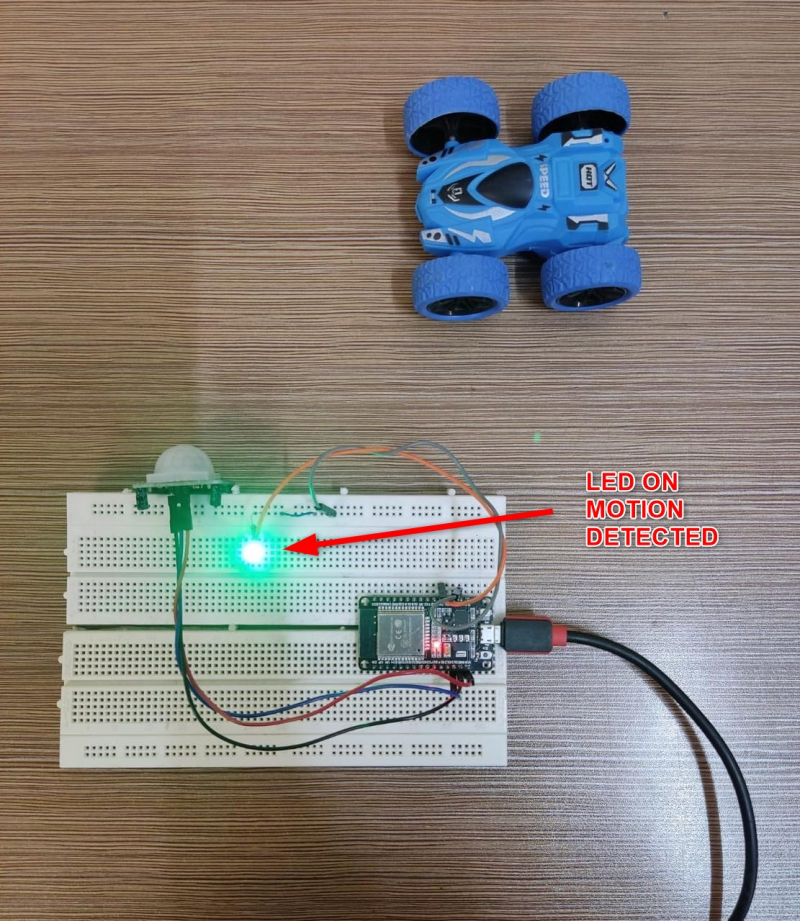
Στην ενότητα εξόδου μπορούμε να δούμε ότι το αντικείμενο βρίσκεται εκτός εμβέλειας του αισθητήρα PIR, οπότε το LED είναι γυρισμένη ΜΑΚΡΙΑ ΑΠΟ .
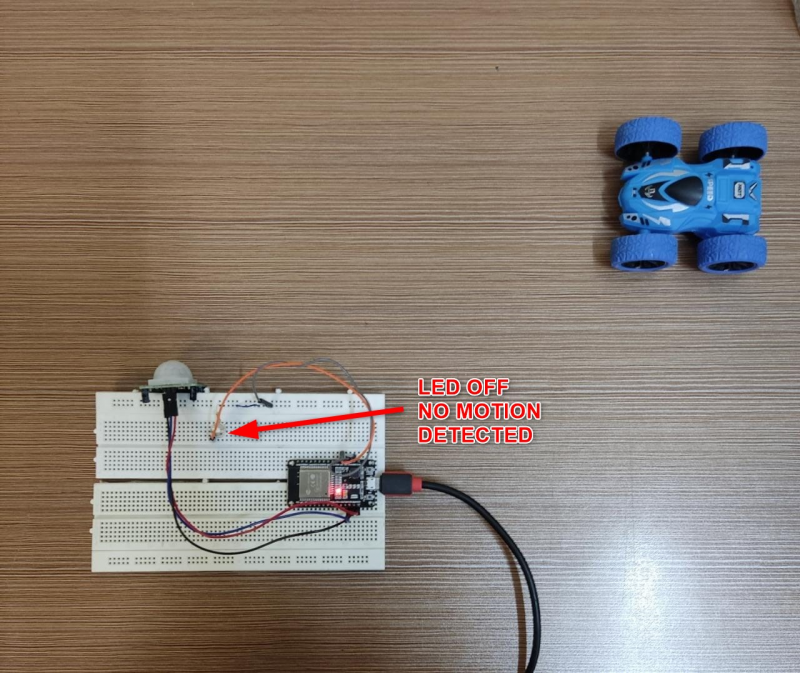
Τώρα η κίνηση που ανιχνεύεται από το LED του αισθητήρα PIR θα γυρίσει ΕΠΙ Για 5 δευτ Μετά από αυτό, εάν δεν εντοπιστεί κίνηση, θα παραμείνει ΜΑΚΡΙΑ ΑΠΟ μέχρι να ληφθεί η επόμενη σκανδάλη.
Η ακόλουθη έξοδος εμφανίζεται από το κέλυφος/τερματικό στο Thonny IDE.
συμπέρασμα
Ένας αισθητήρας PIR με ESP32 μπορεί να βοηθήσει στην ανίχνευση κίνησης διαφορετικών πραγμάτων. Χρησιμοποιώντας τη συνάρτηση διακοπής στο MicroPython με ESP32 μπορούμε να ενεργοποιήσουμε μια απόκριση σε κάποιο συγκεκριμένο pin GPIO. Όταν εντοπιστεί αλλαγή, η λειτουργία διακοπής θα ενεργοποιηθεί και ένα LED θα ανάψει.